伺服系统浅析伺服系统的分类、结构组成与技术方面的要求




伺服系统浅析伺服系统的分类、结构组成与技术方面的要求
发布时间:2024-02-14 22:33:51 来源:博亿堂娱乐官方网站- 系统,亦称随动系统,是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度或力输出的自动
系统,亦称随动系统,是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度或力输出的自动控制系统。大多数需不断检测在各种扰动作用下被控对象输出量的变化,与指令值作比较,并用两者的偏差值对系统来进行自动调节,以消除偏差,使被控对象输出量始终跟踪输入的指令值。
伺服系统是依据输入的指令值与输出的物理量之间的偏差进行动作控制的。因此伺服系统的工作过程是一个偏差不断产生,又不断消除的动态过渡过程。
伺服控制的实例随处可见,如工人操作机床来加工时,必须用眼睛始终观察工艺流程的进行情况,通过大脑对来自眼睛的反馈信息做处理,决定下一步如何操作,然后通过手摇动手轮,驱动工作台上的工件或刀具来执行大脑的决策,消除工艺流程中出现的偏差,最终加工出符合标准要求的工件。在这个例子中,检测、反馈与控制等功能是通过人来实现的,而在伺服系统中,这些功能都要通过传感器、控制及信息处理装置等来加以实现。如数字控制机床的伺服系统中,位置检测传感器、数控装置和伺服电动机分别取代了人的眼睛、大脑和手的功能。
许多机电一体化产品(如数字控制机床、工业机器人等),需要对输出量进行跟踪控制,因而伺服系统是机电一体化产品的一个重要组成部分,而且往往是实现某些产品目的功能的主体。伺服系统中离不开机械技术和电子技术的综合运用,其功能是通过机电结合才得以实现的,因此,伺服系统本身就是一个典型的机电一体化系统。

开环伺服系统即无位置反馈的系统,其驱动元件主要是功率步进电机或液压脉冲马达。这两种驱动元件的工作原理的实质是数字脉冲到角度位移的变换,它不用位置检测元件实现定位,而是靠驱动装置本身,转过的角度正比与指令脉冲的个数;运动速度由进给脉冲的频率决定。
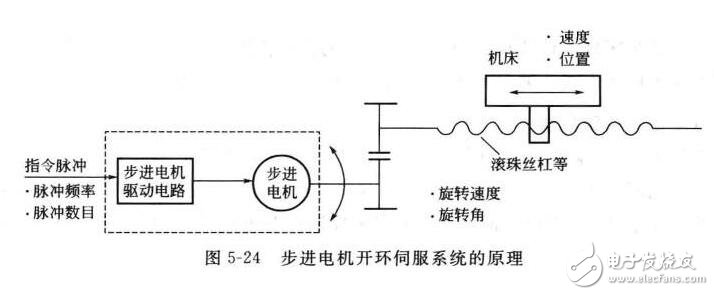
开环伺服系统的结构相对比较简单,易于控制,但精度差,低速不平稳,告诉扭矩小。通常用于轻载负载变化不大或经济型数字控制机床上。
闭环伺服系统是误差控制随动随动系统。数字控制机床进给系统的误差,是CNC输出的位置指令和机床工作台(或刀架)实际位置的差值。闭环系统运动执行元件不能反映运动的位置,因此就需要有位置检测装置。该装置测出实际位移量或者实际所处的位置,并将测量值反馈给CNC装置,与指令作比较,求得误差,依次构成闭环位置控制。
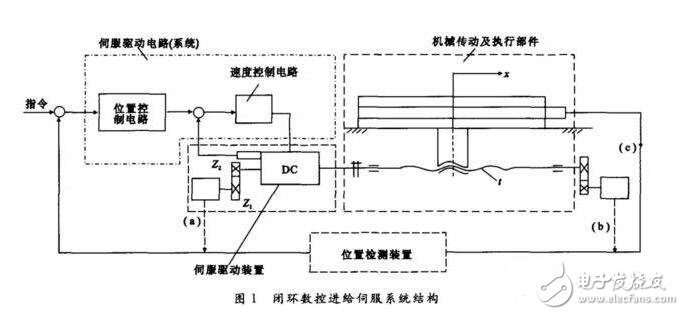
由于闭环伺服系统是反馈控制,反馈测量装置精度很高,所以系统传动链的误差,环内各元件的误差以及运动中造成的误差都能够获得补偿,从而大幅度的提升了跟随精度和定位精度。
位置检测元件不直接安装在进给坐标的最终运动部件上,而是中间经过物理运动部件的位置转换,称为间接测量。亦即坐标运动的传动链有一部分在位置闭环以外,在环外的传动误差没有正真获得系统的补偿,因而这种伺服系统的精度低于闭环系统。
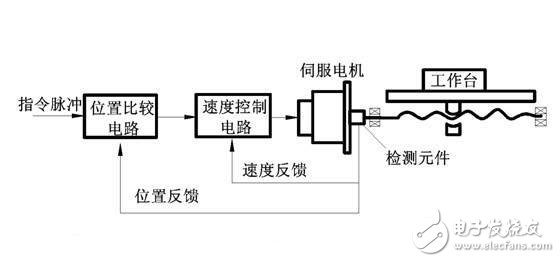
半闭环和闭环系统的控制结构是一致的,不同点只是闭环系统环内包括较多的物理运动部件,传动误差均可被补偿。理论上精度能够达到很高。但由于受机械变形、气温变化、振动以及其它因素的影响,系统稳定性难以调整。此外,机床运行一段时间后,由于物理运动部件的磨损、变形以及其它因素的改变,容易使系统稳定性改变,精度发生明显的变化。因此,目前使用半闭环系统较多。只在具备传动部件紧密度高、稳定性很高、使用的过程温差变化不大的高精度数字控制机床上使用全闭环伺服系统。
直流伺服系统常用的伺服电机有小惯量直流伺服电机和永磁直流伺服电机(也称为大惯量宽调速直流伺服电机)。小惯量伺服电机最大限度地减少了电枢的转动惯量,所以能获得最好的快速性。小惯量伺服电机一般都设计成有高的额定转速和低的惯量,所以应用时,要经过中间物理运动(如齿轮副)才能与丝杠相连接。
交流伺服系统使用交流异步伺服电机和永磁同步伺服电机。由于直流伺服电机存在着固有的圈点,使其应用环境受到限制。交流伺服电机没有这些缺点,且转子惯量较直流电机小,使得动态响应好。另外在同体积条件下,交流电机的输出功率可比直流电机提高10%~70%。还有交流电机的容量能比直流电机造的大,达到更高的转速和电压。
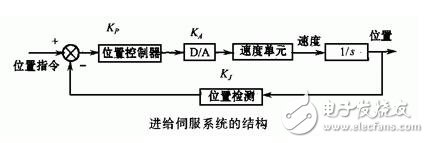
进给伺服系统是指一般概念的伺服系统,它包括速度控制环和位置控制环。进给伺服系统完成各坐标轴的进给运动,具有定位和轮廓跟踪功能。
严格来说,一般的主轴控制只是一个速度控制管理系统。主要实现主轴的旋转运动,提供切削过程中的转矩和功率,且保证任意转速的调节,完成在转速范围内的无极变速。具有C轴控制的主轴与进给伺服系统一样,为一般概念的位置伺服控制管理系统。
机电一体化的伺服控制管理系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般来说包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。下图给出了伺服系统组成原理框图。
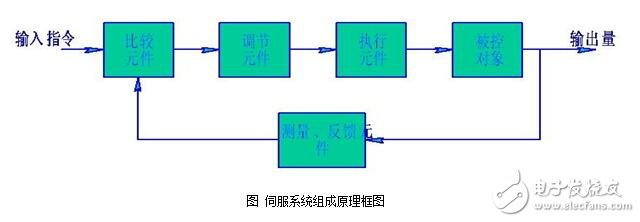
比较环节是将输入的指令信号与系统的反馈信号作比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。?
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
执行环节的作用是按控制信号的要求,将输入的各种各样的形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
检测环节是指能够对输出做测量并转换成比较环节所需要的量纲的装置,一般来说包括传感器和转换电路。
伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差、稳态误差和静态误差三个方面组成。
伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能力;或者当给系统一个新的输入指令后,系统达到新的稳定运作时的状态的能力。
响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与许多因素相关,如计算机的工作速度、运动系统的阻尼和质量等。
工作频率通常是指系统允许输入信号的频率范围。当工作频率信号输入时,系统能够按技术方面的要求正常工作;而其它频率信号输入时,系统异常工作。