企业新闻
双极性步进电机的根本组件有哪些
发布时间:2024-01-20 21:11:32 来源:博亿堂娱乐官方网站因其特有的开环方位操控功能而被大范围的使用。各设备在步进电机滚动的过程中,对它输出力矩的滑润性有必定的要求。滚动的稳定性除了和步进电机的本体结构有关,也和步进电机的操控办法休戚相关。
步进电机归于无刷直流 (BLDC) 电机,它依照等长的步进值逐渐滚动。而双极性步进电机则是每相都具有一个绕组的步进电机,详细而言是两相四线步进电机。它由定子和转子两个首要部件组成(见图 1)。
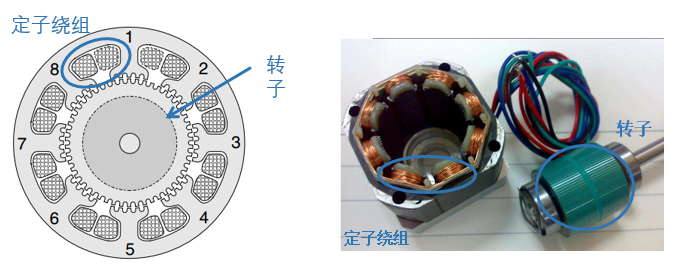
定子是电机的停止部分。8 个定子上别离绕有两相双极性绕组,每个定子铁芯上带有五齿(见图 1)。
A 相绕组绕线 开端绕,顺次绕到定子3, 5, 7上(见图 2)。 有必要留意一下的是,定子 1 和 5 的绕线 的绕线方向相同。这两组(定子 1 和 5,以及定子 3 和 7)的绕线方向相反。B 相绕组也是以相同的原理进行绕制,其间定子 4 和 8 为一组,定子 2 和 6 为一组。
永磁体的磁力线在电机本体内构成闭合。由于磁力线和磁阻效应,即便步进电机在不通电的情况下也有必定的确定力矩(见图 4)。
转子上具有 50 个齿,和定子齿轮相对起来,由于这样的齿数和相数结构,它具有 1.8 度的步进视点(见图 5)。步进视点:电气周期完结 90 度,步进电机转子行进的机械视点。
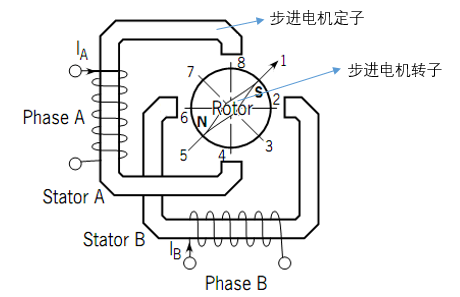
为了便利解说后续的操控办法,咱们将杂乱的结构图简化为示意图(见图 6)。
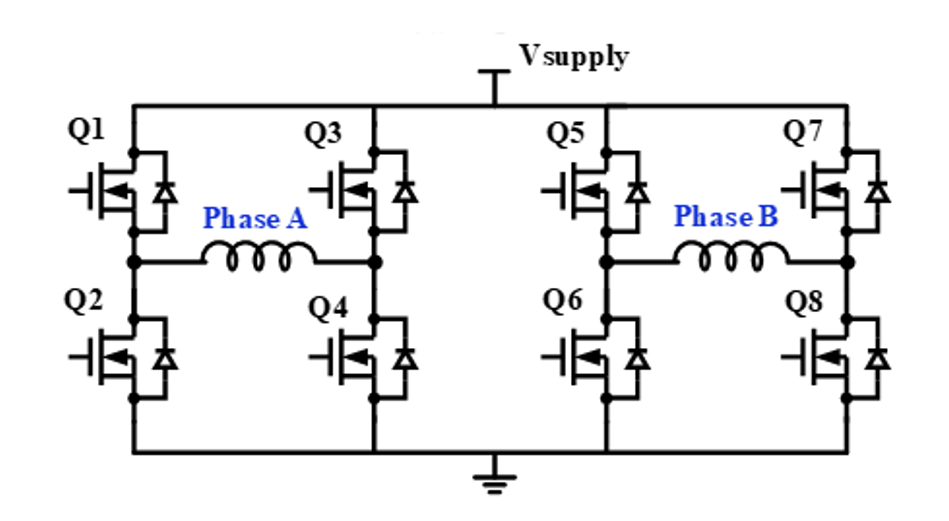
步进电机的定子和转子能够被看作都只要一个齿,这使步进电机的驱动办法不一样于其他电机。这种办法叫做双全桥驱动,其间 A 相绕组接在第一个全桥驱动上, B 相绕组接在第二个全桥驱动上(见图 7)。
双极性步进电机具有三种操控形式:单相步进、整步步进和半步步进(见表 1)。
当 A 通电的时分,驱动电流由 Q1 流向 Q4。此刻定子 A 上端为 N,下端在 S,转子转到方位 8(见图 6)。
接下来,B 相通电,驱动电流由 Q5 流向 Q8。此刻定子 B 左端为 S,右端为 N,转子转到方位 2(见图 6)。
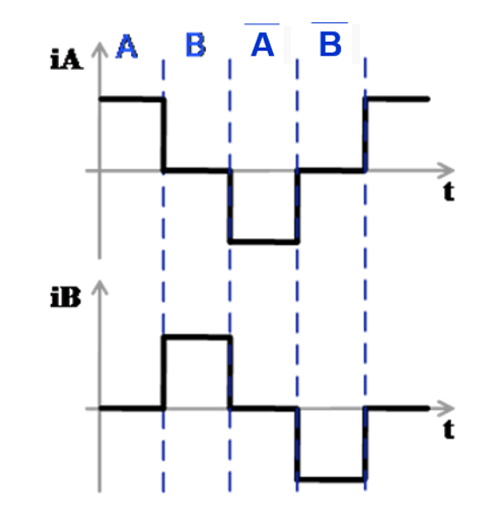
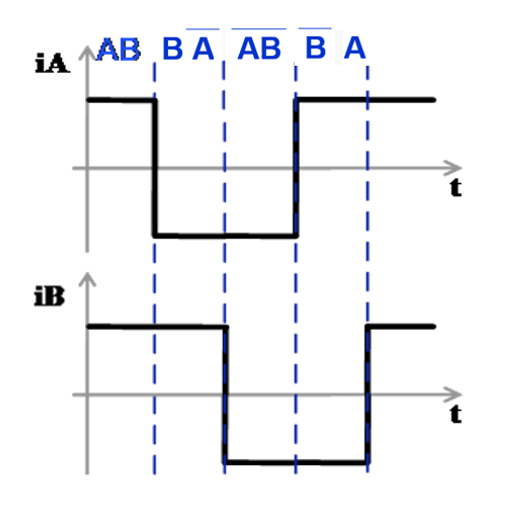
与单相步进不同的是,整步步进式 AB 绕组会一同进行通电。其他的还有四个对应的通电办法和转子电气方位,仅仅其方位空间在电气空间上不同于单相步进。依据整部的通电次序,转子也能滚动起来。图 9 显现了 AB 相的整步电流波形。
半步形式将单相步进和整步步进这两种操控办法来进行交融,它的电气视点方位更多,电流波形愈加详尽,滚动愈加滑润。
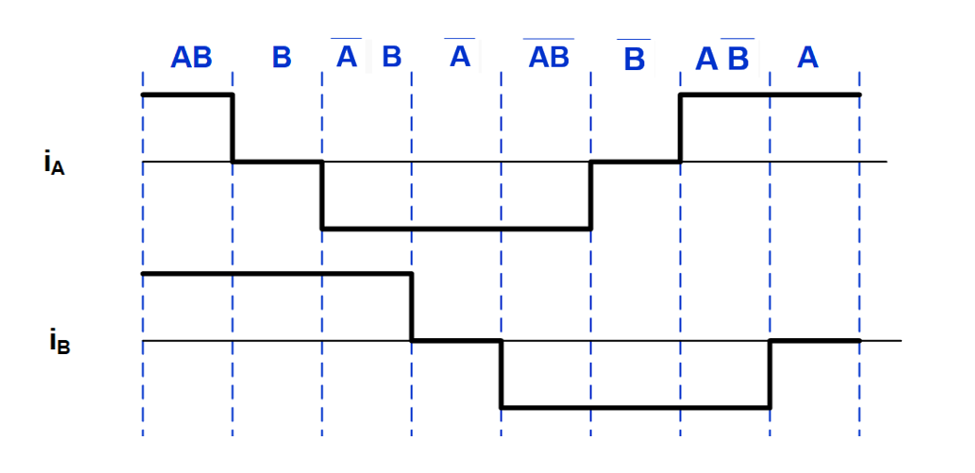
图 10 显现了单相到两相操作的非循环半步形式。这种形式在整步和半步之间替换生成 8 步序列。
本文回忆了双极性步进电机的根本组件(定子和转子),以及三种首要的操控形式:单相步进、整步步进和半步步进。鄙人一篇文章中,咱们将评论双全桥驱动的微步进形式。
驱动电路 /
的根本结构 /
操控芯片与功率驱动电路组成。L297芯片产生脉宽可调的脉冲相序信号,该信号作为
为了便利解说,这儿选用一个电磁线圈。由于异性相吸,然后转子就会产生滚动,这个滚动正是
每个绕组都能轻松完成两个方向通电,故各绕组的某一端既能够是N极也能够是S极。由于它有两组独立的 线圈,一切还被称为两相