电液伺服阀的应用场景_电液伺服阀维修操作程序
发布时间:2024-03-05 15:56:21 来源:博亿堂娱乐官方网站电液伺服阀由于其高精度和快速控制能力,除了航空航天和军事装备广泛使用的领域外,在机床、塑料、轧钢机、车辆等各种工业设施的开环或闭环的电液控制管理系统中。特别是系统要求高的动态响应、大的输出功率的场合获得了广泛应用。
(1)电液伺服阀的位置控制回路。图172所示为电液伺服阀控制的液压缸直线 (a)所示为其原理图,图172 (b)所示为其职能方框图。当系统由指令电位器输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向液压缸3供油,驱动负载到预定位置,反馈电位器(位置传感器)检测到的反馈信号与输入指令信号经伺服放大器1比较,使执行器精度运动在所需位置上。
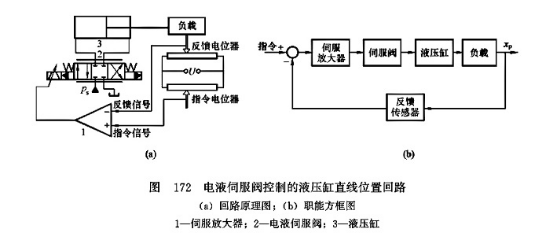
图173所示为电液伺服阀控制的液压马达直线 (a)所示为其原理图,图173 (b)所示为其职能方框图。当系统输入指令信号后,由能量转换放大,液压源的压力油经电液伺服阀2向液压马达3供油,齿轮减速器4和丝杠螺母机构5将马达的回转运动转换为负载的直线运动,位置传感器检验测试到的反馈信号与输入指令信号经伺服放大器1比较,使负载精度运动在所需位置上。
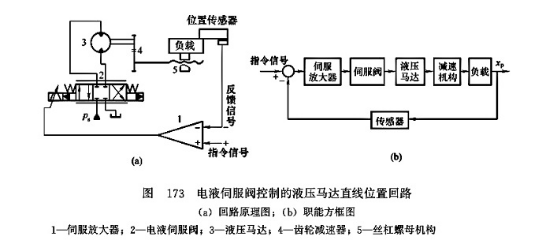
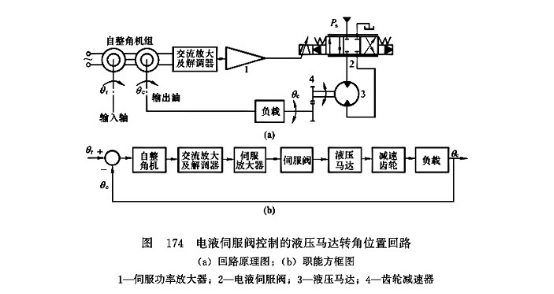
图174所示为电液伺服阀控制的液压马达转角位置回路,图174 (a)所示为其原理图,图174 (b)所示为其职能方框图。它采用白整角机组作为角差测量装置(3根线表示定子绕组的引出线根线表示转子绕组的引出线,通过圆心的点画线表示转轴),输入轴与发送机轴相连,输出轴与接收机相连。自整角机组检测输入轴和输出轴之间的角插,并将角差转换为振幅调制渡电压信号,经交流放大器放大和解调器解调后,将交流电压信号转换为直流电压信号,再经伺服功率放大器l放大,产生一个差动电流去控制电液伺服阀2,液压能量放大后,液压源的压力油经电液伺服阀2向液压马达3供油,马达通过齿轮减速器4驱动负载作回转运动,经上述反馈信号与输入指令信号的比较,使负载精确运动在所需转角位置上。
(2)电液伺服阀的速度控制回路。图175所示为利用电液伺服阀控制双向定量液压马达回转速度保持一定值的回路,图175 (a)所示为其原理图,图175 (b)所示为其职能方框图。当系统输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向双向液压马达3供油,使液压马达驱动负载以一定转速工作;同时,测速电动机(速度传感器)4的检测反馈信号uf与输入指令信号经伺服放大器1比较,得到的误差信号控制电液伺服阀的阀口开度,从而使执行器转速保持在设定值附近。
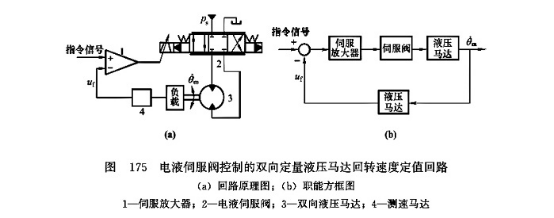
图176所示为开环变量泵控制的液压马达速度回路,图176 (a)所示为其原理图,图176 (b)所示为其职能方框图。双向变量液压泵5、双向定量液压马达6及安全溢流阀组7和补油单向阀组8组成闭式油路,通过改变变量泵5的排量对液压马达6调速。而变量泵的排量调节通过电液伺服阀2控制的双杆液压缸3的位移调节来实现。执行元件及负载与电液伺服闷控制的液压缸之间是开环的。当系统输人指令信号后,控制液压源的压力油经电液伺服阀2向双杆液压缸3供油,使液压缸驱动变量泵的变量机构在一定位置下工作;同时,位置传感器4的检测反馈信号与输入指令信号经伺服放大器1比较,得出的误差信号控制电液伺服阀的阀口开度,从而使变量泵的变量机构即变量泵的排量保持在设定值附近,最终保证液压马达6在希望的转速值附近工作。
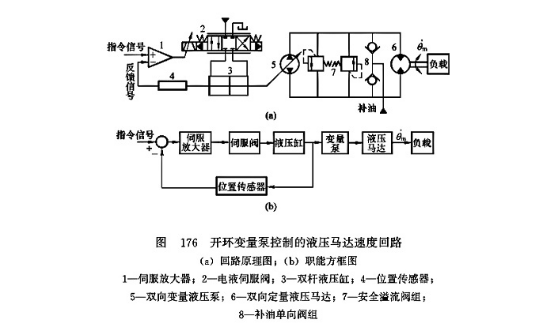
图177所示为闭环变量泵控制的液压马达速度回路,图177 (a)所示为其原理图,图177 (b)所示为其职能方框图。其中油路结构与图176所示开环变量泵控制的液压马达速度回路基本相同,所不同的是在负载与指令机构间增设了测速电动机(速度传感器)9,从而构成一个闭环速度控制回路。因此其速度控制精度更高。

(3)电液伺服阀的力和压力控制回路。图178 (a)所示为电液伺服阀的力控制回路.油源经电液伺服阀2向双杆液压缸3供油,液压缸产生的作用力施加在负载上,力传感器4的检测反馈信号与输人指令信号经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持负载受力的基本恒定。图178(b)所示为维持双杆液压缸两腔压力差恒定的控制回路,当电液伺服阀2接受输入指令信号并将信号转换放大后,使双杆液压缸3两腔压力差达到某一设定值。缸内压力变化时,液压缸近旁所控制的压差传感器5的检测反馈信号与输人信号指令经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持液压缸两腔压差的基本恒定。图178(c)所示为电液伺服阀的力和压力控制回路的职能方框图。
(4)电液伺服阀的液压缸同步控制回路。图179所示为利用电液伺服阀放油的液压缸同步控制回路。分流阀6用于粗略同步控制,再用电液伺服阀5根据位置误差检测器(差动变压器)3的反馈信号进行旁路放油,实现精确的同步控制。该回路同步精度高(达0.2mm),可自行消除两缸位置误差;伺服阀发生故障时仍可实现粗略同步。伺服阀可采用小流量阀实现放油,但成本比较高,效率较低,适用于同步精度要求比较高的场合。
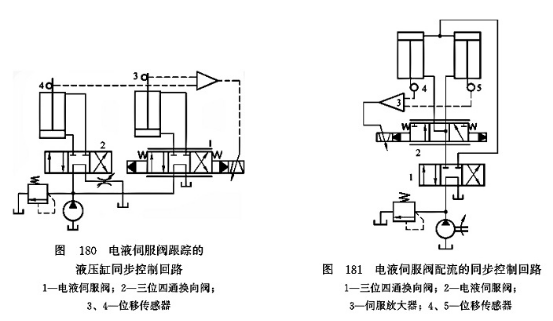
图180所示为利用电液伺服阀跟踪的液压缸同步控制回路。电液伺服阀1控制阀口开度,输出一个与换向阀2相同的流量,使两个液压缸获得双向同步运动。该回路同步精度高,但价格较贵。适用于两液压缸相隔较远,有要求同步精度很高的场合。
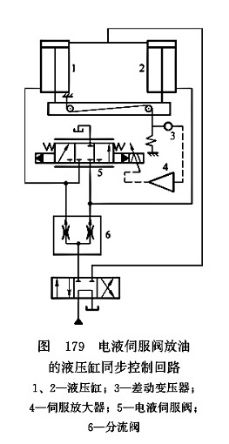
图181所示为利用电液伺服阀配流的同步控制回路。电液伺服阀2根据位移传感器4和5的反馈信号持续地调整阀口开度,控制两个液压缸的输人或输出流量,使它们获得双向同步运动。该回路的特点与图175所示回路相同。
调整:将新更换的部件来安装,接着进行调整,确保电液伺服阀的动作和压力等参数符合要求。
在进行电液伺服阀维修操作前,需要对操作的人进行安全培训和液压系统的排空、排气工作。同时,需要用符合相关规定的工具和材料,避免损坏电液伺服阀和液压系统。
摘 要:本文介绍了基于FPGA的自带移相信号源的相位测量仪的设计。在系统模块设计中研究了DDS信号源的FPGA实现方法。经过验证,系统结构相对比较简单,运行可靠。 关键词:DDS;FPGA;VHDL;相位测量 引言 随着集成电路的发展,利用大规模集成电路来完成各种高速、高精度电子仪器的设计慢慢的变成了一种行之有效的方法。采用这种技术制作而成的电子仪器电路结构相对比较简单、性能可靠、测量精确且易于调试。本文采用Altera CycloneII系列FPGA器件EP2C5,设计了高精度相位测量仪。测量相位差所需的信号源在FPGA内部运用DDS原理生成,然后通过高速时钟脉冲计算两路正弦波过零点之间的距离,最后通过一定的运算电路得到最终相位值,测相精度为1%
TDK宣布发布Tronics AXO315,这是一款微型高性能1轴闭环MEMS加速度计,24位数字SPI接口,采用SMD封装,可达到石英传感器的性能,优于传统商用MEMS传感器,并易于集成。在工业,陆地,铁路,海军和建筑应用中常见的严酷温度和振动条件下,新型平衡加速度计具有非常出色的一年复合偏置可重复性1 mg的误差,可重复性误差比为600ppm。其出色性能可以令工业运动控制单元,惯性测量单元(IMU)和惯性导航系统(INS)的材料尺寸,重量和成本大幅度的降低。 AXO315是±14 g范围内的平面线性加速度计。它的设计和开发旨在在最具挑战性的环境中提供高精度和高可靠性。在-55°C至+105°C的温度范围内,它在一年内可实现1
MEMS加速度计,可替换传统石英传感器 /
技术描述: M2系列模组基于北云科技新一代22nm制程高性能车规级GNSS SOC芯片Alice开发,内置高精度测量引擎、导航引擎、惯性导航单元以及功能安全处理器,符合ASIL B功能安全等级,支持高性能NRTK/PPP/PPP-RTK解算、深耦合组合导航、抗干扰与L-BAND PPP等功能,可以有明显效果地地应对卫星信号干扰、丢失等苛刻环境,提供连续、实时、可信的高精度位置与姿态信息。可应用于无人驾驶、高级驾驶辅助、车道级导航、无人机、智能机器人等领域。 独特优势: 1、全温标定高精度IMU及深耦合组合导航引擎 内置高精度IMU均经过全温标定,改善了零偏稳定性等关键指标,提升了航位推算精度。内置基于bynav Alice芯
定位/组合导航模组 /
前言 在数据采集系统中,模数转换器是其中至关重要的环节,模数转换器的精度以及系统的成本直接影响到系统的实用性,因此,怎么样提高模数转换器的精度和降低系统的成本是衡量系统有没有实际应用价值的标准。 一般来说,想提高模数转换器的精度,势必会引起成本的增加,这就要求我们按照具体的精度要求合理的设计模数转换器,来达到具体的要求和降低系统的成本。在精度要求不是很高的场合,我们大家常常利用嵌入微控制器片内的A/D转换器来实现模数转换,以此来降低系统的成本,但由此又产生了另外的问题,嵌入式模数转换器有没有所要求的精度,若超出测量范围如何与测量电路进行接口,以及如何减小微控制器的电磁干扰提高嵌入式模数转换器的精度问题。这都要求我
摘要:介绍高精度的实时时间芯片X1288的主要特征、工作原理及实际应用。给出具体的内部框图、计时精度调节原理、高精度定时的PCB设计和读写操作的基本程序。 关键词:RTC X1288 高精度 精度调节 引言 X1288是Xicor公司最新推出的高精度多功能时间芯片。除了提供高精度的时间外,还提供了片内的32K%26;#215;8位的EEPROM、看门狗、2个警告和备和电源的自动切换、频率输出等大量实用的功能。由于它使用的外部晶振能选用低价格的32.768kHz晶体振荡器,所以芯片的价格实惠公道。它提供的时间分辨率为1/100s,以及小于5%26;#215;10 -6的年变化率,使得它得以在手机、POS设备、智能仪表、控制装置
本报南京5月21日电 (记者蒋建科)记者今天从第五届中国卫星导航学术年会了解到,我国将于2015年前发射新一代北斗导航卫星,开展新技术和新体制试验验证,适时加入卫星网络,并于2015年前后开始提供服务。北斗卫星导航系统计划于2020年前后实现全球覆盖。 据中国卫星导航系统管理办公室主任冉承其介绍,我国即将发射的新一代北斗导航卫星,在技术和管理上具有诸多创新:其一,精度再提高2倍,即由目前的10米提升至2.5米;其二,达到全球覆盖设计目标;其三,新增自主运行管理能力,即可不依赖地面控制管理系统,而靠空间运行卫星的星间链路构成管理新体系;其四,新建平台多达十几个,新技术启用160多项。 北斗卫星导航系统按照“三步走”的总体
无线技术控制充电 的方式慢慢的变成了新的发展潮流和趋势,随着 CANFD 在汽车电子与轨道交通等行业的广泛应用,无线技术控制充电又将怎么来实现大功率快充?本文将介绍一套简单可行的方案。 一、传统方式充电的弊端 如图 1 所示,传统的新能源汽车是采用充电枪的方式来进行充电,每次操作都是需要人工控制,在多次使用插拔的过程中充电枪和汽车充电接口之间的间隙会逐渐变大,这样易产生放电,导致充电枪烧毁。这种情况下,增加了不必要的维修成本,更严重地会发生触电安全事故或火灾等情况。 另外,传统方式充电电流最大不超过 250A,充电功率较低,充电时间相对较长。随着汽车智能化、电动化、网联化的发展,未来新能源汽车采用大功率的快充方式也将成为
充电 /
0 引言 随着集成电路规模逐步扩大,尤其是芯片系统集成技术的提出,对模拟集成电路基本模块(如A/D、D/A转换器、滤波器以及锁相环等电路)提出了更高的精度和速度要求,这也就从另一方面代表着系统对其中的基准源模块提出了更高的要求。 用于高速高精度ADC的片内电压基准源不仅要满足ADC精度和采样速率的要求,并应具有较低的温度系数和较高的电源抑制比,此外,随着低功耗和便携的要求,ADC也在朝着低压方向发展,相应的基准源也要满足低电源电压的要求。 本文分析了基准源对流水线ADC精度的影响,并建立了相应的模型,确定了高速高精度ADC对电压基准源的性能要求。给出了基于1.8 V的低电源电压,并采用结构相对比较简单的VBE非线性二阶补偿带隙基准源的
系统设计指南 (埃利斯)
射频调制激光雷达
有奖征文:邀一线汽车VCU/MCU开发工程师,分享开发经验、难题、成长之路等
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!第三期考题上线,跟帖赢好礼~
有奖直播 同质化严重,缺乏创新,ST60毫米波非接触连接器,赋予你独特的产品设计,重拾市场话语权
据 MoneyDJ 援引 Jiji Press 报道,韩国存储器巨头 SK海力士正在探索与日本 NAND 闪存制造商铠侠合作,生产用于AI应用的高带 ...
Yuridenki-Shokai即将推出基于刚刚发布的瑞萨 RZ V2H Arm 微处理器的 Kaki Pi 单板计算机,配备强大的 80 TOPS AI 加速器,具有 ...
Cadence 扩充 Tensilica Vision 产品线,新增毫米波雷达加速器及针对汽车应用优化的新款 DSP
内容提要单个 DSP 用于嵌入式视觉、雷达、激光雷达和 AI 处理,在性能提升的前提下,带来显著的面积优化、功耗和成本的降低针对 4D ...
作为Raspberry Pi的全球独家授权商,e络盟现为工程师、爱好者和创客提供创新型 Raspberry Pi 5中国上海,2024年3月4日安富利旗下全球 ...
美光 HBM3E 比竞品功耗低 30%,助力数据中心降低经营成本2024 年 3 月 4 日,中国上海 —— 全球内存与存储解决方案领先供应商 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科